

")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
|
850 руб
+
-
В корзину
|

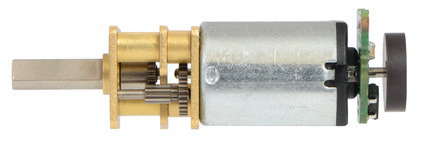
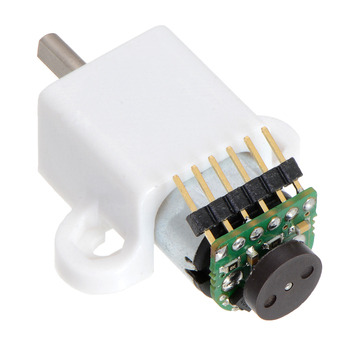
Добавьте квадратурные энкодеры к вашим металлическим микро мотор-редукторам (требуется удлиненный задний вал) с этим комплектом, который использует магнитные диски и сенсоры эффекта холла, чтобы обеспечить 12 отсчетов за оборот вала двигателя. Датчики работают от 2,7 В до 18 В и обеспечивают цифровые выходы, которые могут быть подключены непосредственно к микроконтроллеру или другой цифровой цепи. Эти энкодеры имеют выводы в виде сквозных отверстий с шагом 2 мм, и для их использования необходимо припаять провода или разъемы с шагом 2 мм. Этот модуль совместим со всеми мотор-редукторами имеющими дополнительный удлиненный вал двигателя, такими как Gekko MR12 и Pololu.
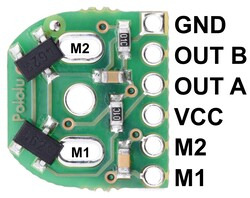
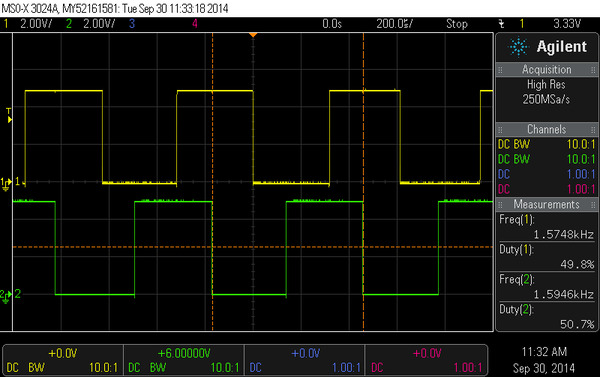
Описание:Этот комплект включает в себя две двухканальные платы датчиков Холла и два 6-полюсных магнитных диска, которые можно использовать для добавления квадратурного кодирования к двум металлическим микро мотор-редукторам с удлиненными задними валами (двигатели не входят в комплект этого комплекта). Плата энкодера воспринимает вращение магнитного диска и обеспечивает разрешение 12 отсчетов за оборот вала двигателя при подсчете обоих краев обоих каналов. Чтобы вычислить количество оборотов на выходном валу редуктора, умножьте передаточное число на 12.

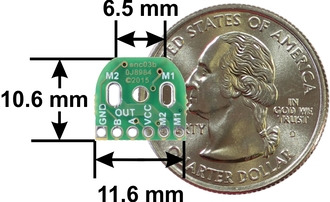
Этот компактный энкодер отлично вписывается в пределах поперечного сечения 12 мм x 10 мм двигателя на трех из четырех сторон, и он выступает только на 0,6 мм от края четвертой стороны (обратите внимание: если вам нужно, чтобы он был на одном уровне с последней стороной, вы можете осторожно немного отломить от платы и припаять к оставшимся полуотверстиям). Модуль не заходит за конец удлиненного вала двигателя, который выступает на 5 мм за пластиковую торцевую заглушку на задней части двигателя.
 |
 |
Плата энкодера предназначена для припаивания непосредственно к задней части двигателя, при этом задний вал двигателя проходит через отверстие в середине печатной платы. Один из способов добиться хорошего выравнивания между модулем и двигателем - это закрепить плату на одном контакте двигателя и припаять другому контакту только тогда, когда плата хорошо выпрямлена и выровнена. Будьте осторожны, чтобы избежать длительного нагрева контактов двигателя, это может привести к деформации пластиковой торцевой крышки двигателя или щеток двигателя. После того, как плата припаивается к двум контактам двигателя, провода для двигателя подключаются к контактным площадкам M1 и M2 по краю платы; остальные четыре контактные площадки используются для питания датчиков и доступа к двум квадратурным выходам.
 |
 |
Датчики питаются через контакты VCC и GND. VCC может быть от 2,7 до 18 В, а квадратурные выходы A и B - это цифровые сигналы, которые либо подаются на низком уровне (0 В) с помощью датчиков, либо вытягиваются на VCC через подтягивающие резисторы 10 кОм в зависимости от применяемого магнитного поля. Компараторы датчиков имеют встроенный гистерезис, который предотвращает ложные сигналы в тех случаях, когда двигатель останавливается вблизи точки перехода.
Шесть контактных площадок платы имеют шаг 2 мм, поэтому они не совместимы с обычными 2,54 мм разъемами. Одним из вариантов подключения к плате является припаивание отдельных проводов.

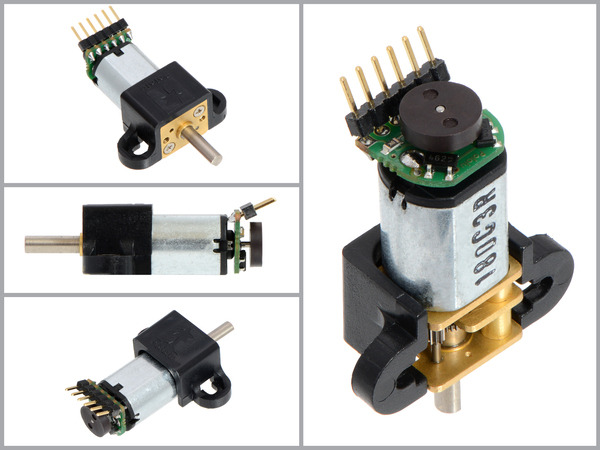
В качестве альтернативы вы можете припаять к плате разъем с шагом 2 мм. В приведенном выше примере показана штырьевая вилка, которая даст вам возможность сделать отсоединяемый кабель, оканчивающийся 6-контактным гнездом с шагом 2 мм. Если контакты расположены под углом к двигателю, как показано на рисунке, они будут едва выступать через отверстия в плате. Обратите внимание, что в этой ориентации есть место для подключения 6-контактного гнезда, даже когда используется Держатель удлиненный Pololu для мотор-редуктора MR12.
Если штырьки направлены от двигателя, они должны быть под углом, чтобы они не задевали магнитный диск. Имея приличный паяльник, можно припаять их в этой ориентации даже после того, как датчик установлен на двигателе.
После того, как плата припаяна к двигателю, диск магнитного энкодера можно вставить на вал двигателя. Один простой способ добиться этого - положите магнитный диск на плоскую поверхность, возьмите двигатель и вставьте вал в отверстие на диске, затем нажмите на двигатель, пока вал не упрется в эту поверхность. Размер зазора между диском энкодера и платой датчика не оказывает большого влияния на характеристики, если вал двигателя по крайней мере полностью проходит через диск.
Принципиальная схема: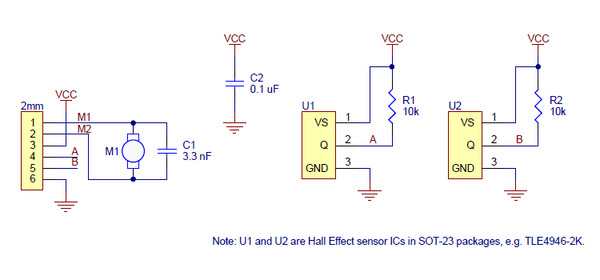
Эта схема также доступна для скачивания в формате pdf (125 КБ pdf).
Данный перевод является собственностью интернет-магазина Robototehnika.ru| Артикул | 04040201 |

")
")
")




