















|
2 180 руб
+
-
В корзину
|

Pololu MinIMU-9 v5 это инерциальный измерительный блок IMU на основе микросхем LSM6DS33 3-осевой гироскоп и 3-осевой акселерометр и LIS3MDL 3-осевой магнитометр. По последовательной шине данных I²C передаются данные о 9 независимых измерениях - вращении, ускорении и магнитных, которые могут быть использованы для определения высоты и абсолютного положения. На плате установлен стабилизатор напряжения 3,3 В и преобразователи логического уровня от 2,5 до 5,5 В. Расстояние между выводами 2,54 мм делает плату простой в использовании со стандартными макетными и монтажными платами.
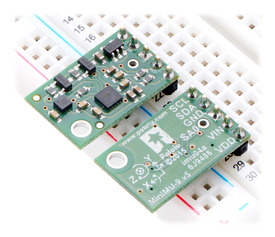
Эта компактная (20,3 х 12,7 мм) плата Pololu MinIMU-9 является инерциальным измерительным устройством, содержащая микросхемы: ST LSM6DS33 сочетающую в одном корпусе 3-осевой гироскоп и 3-осевой акселерометр и ST LIS3MDL 3-осевой магнитометр формируют инерциальный измерительный блок IMU; поэтому мы настоятельно рекомендуем, перед использованием этого продукта, ознакомиться со спецификацией LSM6DS33 (1MB pdf) и со спецификацией LIS3MDL (2MB pdf). Эти датчики являются великолепными интегральными схемами, но маленький корпус делает их использование затруднительным, особенно для обучения и хобби. Они также работают от напряжения ниже 3,6 В, что затрудняет их подключение к микроконтроллерам работающим от 5 В. Эти проблемы решены в этой плате Pololu, путём добавления дополнительных электронных компонентов, в том числе 3,3 В стабилизатора напряжения и схемы смещения логического уровня, сохраняя при этом компактный размер устройства. На плате полностью установлены SMD компоненты и в том числе LSM6DS33 и LIS3MDL, как это показано на фотографии продукта.
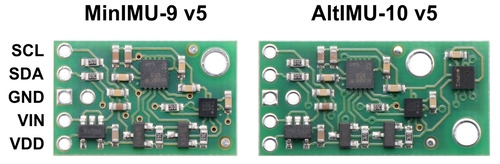
Pololu MinIMU-9 совместим по контактам с Pololu AltIMU-10, который имеет ту же функциональность, плюс дополнен барометром, который может быть использован для получения измерений давления и высоты. Плата Pololu AltIMU-10 имеет дополнительно второе монтажное отверстие и всего на 5,1 мм больше чем Pololu MinIMU-9. Любой код написанный для Pololu MinIMU-9 также должен работать с Pololu AltIMU-10.
У LSM6DS33 и LIS3MDL есть много настраиваемых параметров, включая динамического выбора чувствительности для гироскопа, акселерометра и магнитометра, а также выбор выходной скорости передачи данных для каждого датчика. Эти две микросхемы могут быть доступны через общий I²C/TWI интерфейс, позволяющий отдельно считывать данные всех трех датчиков, через одну шину синхронизации и одну шину данных. Кроме того, контакт конфигурации адреса ведомого устройства позволяет пользователям изменять I²C адреса датчиков и получить два Pololu MinIMU-9 подключенными к одной шине I²C. (Для получения дополнительной информации, смотрите ниже раздел "Передача данных по I²C").
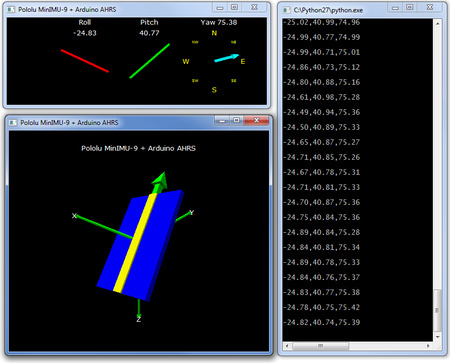
Девять независимых показаний вращения, ускорения и магнитных измерений иногда называют 9DOF (9 степеней свободы), предоставляют все необходимые данные для системы определения пространственного положения (курсовертикаль) AHRS. Используя соответствующий алгоритм, микроконтроллер или компьютер может использовать данные для расчета ориентации платы Pololu MinIMU-9; гироскоп позволяет очень точно отслеживать вращение за короткий промежуток времени, в то время как акселерометр и компас могут помочь компенсировать дрейф данных гироскопа с течением времени, путем предоставления абсолютной системы отсчета. Датчики объединены на плате так, что ориентированность их осей облегчает процесс вычисления. (Пример использования на Arduino, смотрите рисунок ниже и в разделе "Пример Кода" в нижней части этой страницы).
Плата включает в себя стабилизатор с низким падением напряжения, обеспечивающий 3,3 В необходимые для LSM6DS33 и LIS3MDL, и позволяет подключать датчик к внешнему источнику питания 2,5 - 5,5 В. Выход стабилизатора доступен на VDD ножке, и может служить источником питания внешних устройств с током потребления до 150 мА. Плата также включает в себя схему, смещающую (подтягивающую) шины синхронизации и данных интерфейса I²C к напряжению логического уровня вывода VIN, что делает её простой для взаимодействия с 5 В устройствами, а 2,54 мм расстояние между штырьками упрощает использование ее со стандартными макетными и монтажными платами.
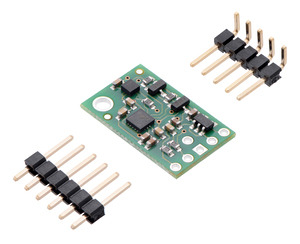
СпецификацияВилка штыревая прямая 1x6 шаг 2,54 мм и вилка штыревая угловая 1x5 шаг 2,54 мм. Вы можете припаять разъёмы прямо к плате и использовать со стандартными макетными и монтажными платами с расстоянием между выводами 2,54 мм, либо припаять провода прямо на плату для более компактной конструкции.
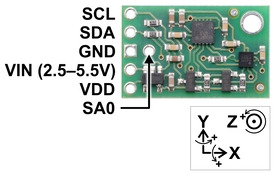
Для подключения платы Pololu MinIMU-9 необходимо, по крайней мере, 4 контакта: VIN (питание), GND (земля), SCL и SDA (выводы датчиков). VIN необходимо соединить с источником питания 2,5 - 5,5 В, GND к нулевому потенциалу – "земле", а SCL и SDA подключаются через шину I²C, работающей на том же логическом уровне, что и VIN. (Кроме того, если вы используете плату с питанием в 3,3 В, вы можете оставить разъём VIN отключенным и обойти встроенный стабилизатор, подключив 3,3 В непосредственно к VDD).
 |
 |
| Вывод | Пояснение |
|---|---|
| VDD | Выход со стабилизатора 3,3 В. Почти 150 мА доступно для питания внешних компонентов. (Если вы хотите, обойти внутренний стабилизатор, вы можете использовать разъём как вход питания 3,3 В, предварительно отключив VIN.) |
| VIN | Входное напряжение 2,5 - 5,5 В. Уровни SCL и SDA "подтягиваются" шиной I²C до этого уровня. (Напряжение питания соответствует высокому логическому уровню на выводах). |
| GND | Земля (0 В) соединяется с нулевым потенциалом (землёй) вашего источника питания. Земля должна быть общей для источника питания и для интерфейса управления платой I²C. |
| SCL | Уровень смещением шины синхронизации SCL I²C: ВЫСОКИМ является уровень VIN, НИЗКИМ = 0 В. |
| SDA | Уровень смещением шины данных SDA I²C: ВЫСОКИМ является уровень VIN, НИЗКИМ = 0 В. |
| SA0 | Вход с логическим уровнем 3,3 В для определения ведомого адреса I²C двух микросхем (см. ниже). Он подтянут по умолчанию через 10 кОм. Этот вывод не "подтягивается" до 5 В. |
Контакты CS, data ready, interrupt - LSM6DS33 и LIS3MDL не доступны на MinIMU-9. В частности, отсутствие контакта CS означает, что дополнительный интерфейс SPI этих микросхем не доступен. Если вы хотите эти функции, рассмотрите вопрос об использовании отдельных модулей Pololu LSM6DS33 и Pololu LIS3MDL.
Схема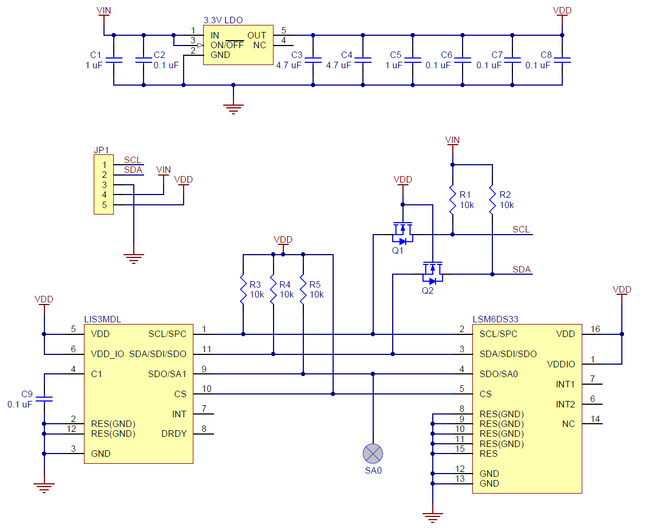
На схеме продемонстрированы дополнительные компоненты платы, необходимые для упрощения использования LSM6DS33 и LIS3MDL. В их числе стабилизатор напряжения - он позволяет плате работать от питания 2,5 - 5,5 В и схема сдвига уровня, позволяющая I²C связываться на том же логическом уровне напряжения, что и VIN. Эта схема также доступна в виде загружаемого PDF: Схема Pololu MinIMU-9 (190k pdf).
Коммуникация по I²CДанные с LSM6DS33 гироскоп и акселерометр и LIS3MDL магнитометр могут быть запрошены, и устройство может быть настроено через шину I²C. Три датчика выступают в качестве ведомых устройств на той же шине I²C (то есть их синхронизирующие выводы, и линия передачи данных связаны друг с другом, чтобы облегчить связь). Кроме того, сдвиг уровня на I²C синхронизации (SCL) и линии передачи данных (SDA) позволяют I²C взаимодействовать с микроконтроллерами, работающими на таком же напряжении, как и VIN (2,5 - 5,5 В). Более полное описание I²C интерфейса для этих микросхем можно найти в спецификации LSM6DS33 (1MB pdf) и в спецификации LIS3MDL (2MB pdf), а также более подробную информацию о I²C в целом можно найти в спецификации NXP шины I²C (1MB pdf).
LSM6DS33 и LIS3MDL имеют отдельные адреса ведомого на шине I²C. На плате соединены вместе контакты "адрес ведомого" SA0 этих микросхем и подтянуты к VDD через резистор 10 кОм. Вы можете подать управляющий низкоуровневый сигнал на контакт SA0, чтобы изменить адрес ведомого. Это позволит подключить два однотипных датчика к одной шине I²C. В следующей таблице приведены адреса ведомых датчиков:
| Датчик | Адрес ведомого (по умолчанию) | Адрес ведомого (SA0 управляющий низкий) |
|---|---|---|
| Гироскоп/Акселерометр | 1101011b | 1101010b |
| Mагнитометр | 0011110b | 0011100b |
При тестировании платы, была достигнута передача с обоих чипов на тактовых частотах до 400 кГц; датчики способен работать и на более высоких частотах, но соответствующие испытания проведены не были. Сами чипы и платы не отвечают некоторым требованиям для создания I²C - совместимых устройств, работающих в быстром режиме. Они пропускают 50 нс импульс на шинах синхронизации и передачи данных, а также требуют дополнительную подтяжку на эти выводы для достижения совместимых характеристик сигнала синхронизации.
Пример кодаНаписаны основные библиотеки для работы с Arduino Библиотека LSM6 для Arduino и Библиотека LIS3MDL для Arduino, которые позволяют легко взаимодействовать Pololu MinIMU-9 с Arduino. Эти библиотеки сделали плату простой для настройки датчиков и считывания первоначально необработанных данных гироскопа, акселерометра и магнитометра.
Для демонстрации того, что вы можете сделать с этими данными, вы можете включить Arduino, подключить к Pololu MinIMU-9 систему определения углового пространственного положения с помощью этой программы для Arduino. Она использует данные из Pololu MinIMU-9 для оценки углов курса (рысканья), тангажа и крена, и вы можете наглядно увидеть выходные данные в 3D-программе, на своём компьютере.
РекомендацииСпецификации предоставляют всю необходимую информацию для использования датчиков на Pololu MinIMU-9, но поиск необходимой информации может занять некоторое время. Вот некоторые советы по соединению и настройке LSM6DS33 и LIS3MDL, которые, помогут вам разобраться немного быстрее:
| Артикул | 04020206 |






